


Next: Active Vision and Visual
Up: Visual Perception Techniques
Previous: Finding Color Transitions along
We have experimented with three different localization methods.
The fist two are described in [1] and were not
used in Seattle. The third, which was applied in Seattle, is based
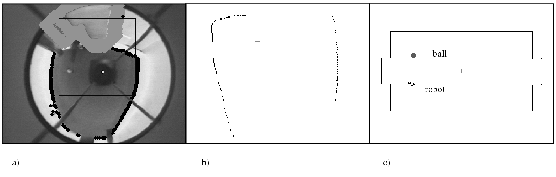
on generating range scans by using omnidirectional vision. We
radially stretch out lines from the center of the omnidirectional
image and search for transitions from the green floor to the white
walls, as shown in Fig.1a). Then,
we use the rotation search/least-squares method described in
[2] to match the range scan to a model of the
environment. However, our case is easier than in [2]
since we have a known environment and the model of the environment
is precise
and polygonal (Fig.1c)).
Figure 1 shows the obtained range
scan that was produced by transforming the transition pixels to a
local coordinate system. This transformation uses a calibrated
monotonic function that maps distances between an image point and
the image center to the distance between the corresponding world
point and the robot.
A special adaption of the
localization has been made for the goal keeper. Here we create a
range scan by searching for transitions from yellow to white (if
our goal is the yellow one).
Figure 1:
Detection of ball, goal and localization of the robot: a)
Transition search, ball and goal detection; Black dots correspond
to found transitions between the wall and the field. Rectangles
(their centers) mark the ball and the goal. b)Obtained range scan
after transforming the points; c)Localization of the robot in
global coordinates;
 |
Next: Active Vision and Visual
Up: Visual Perception Techniques
Previous: Finding Color Transitions along
Sven Behnke
2001-11-01