Next: Localization using Evidence Aggregation
Up: Initial Robot Localization
Previous: Initial Robot Localization
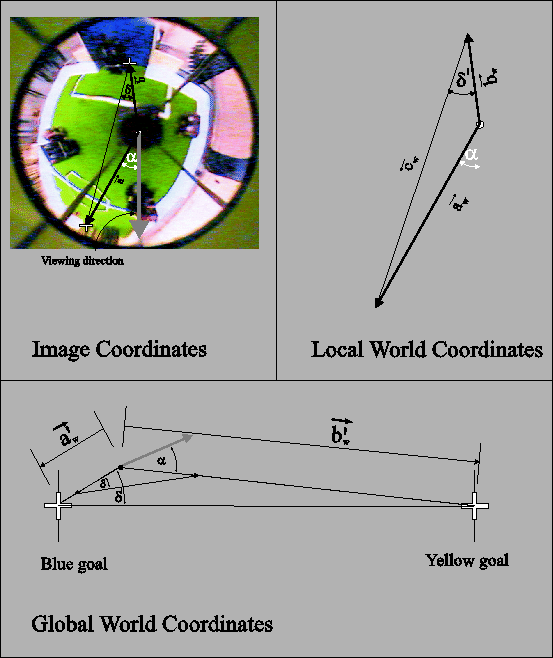
uses the distances to the goals and the angle between the goal vectors to determine the robot's position and orientation.
First, the vectors  and
and  from the perception origin to the goals have to be mapped to local world coordinates.
If
from the perception origin to the goals have to be mapped to local world coordinates.
If  and
and  denote these mapped vectors, we define
denote these mapped vectors, we define
 . Now
. Now  is the angle between
is the angle between  and . Hence, the position
and . Hence, the position  of the robot lies on a line at an angle of to the line connecting the goals.
Knowing the distance to one goal determines . The orientation is also known, because the angle
of the robot lies on a line at an angle of to the line connecting the goals.
Knowing the distance to one goal determines . The orientation is also known, because the angle  at which the other goal appears in the image in respect to the robot's viewing direction is preserved by the optical mapping.
at which the other goal appears in the image in respect to the robot's viewing direction is preserved by the optical mapping.
Sven Behnke
2001-11-01