If we recognize a goal and can estimate its distance from the robot, a circle segment with radius ![]() around goal
around goal ![]() is added to the grid.
The circles will be drawn more fuzzy for great distances, as the estimation of
is added to the grid.
The circles will be drawn more fuzzy for great distances, as the estimation of ![]() becomes worse.
becomes worse.
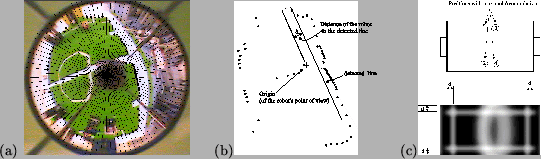 |
Another feature used is the best visible wall that is found by a radial search followed by a Hough Transformation [2]. Lines are sent radially from the robot's perception origin and searched for transitions from the floor to the wall. The transitions found are transformed to local world coordinates, using the cameras' inverse distance function. The corresponding sinusoidal curves are accumulated in parameter space. The most significant local maximum corresponds to the best visible wall. Since it is not known, which wall has been detected, for all walls parallel lines are drawn on the grid at the perceived distance (see Fig. 2).
Local maxima are now candidates for robot locations. They are evaluated by a registration procedure (see next section) that computes a quality measure for a model fit. The best candidate is used to initialize the tracking.