


Next: Computer Vision and Prediction
Up: FU-Fighters 2001 (Global Vision)
Previous: Team Development
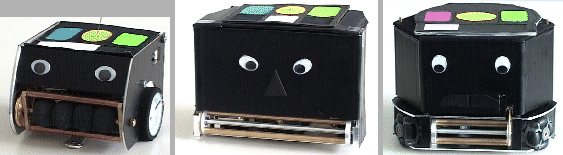
For RoboCup 2001 we built a new generation of omnidirectional robots
as shown in Figure 1.
The robots are equipped with three DC-motors that have an integrated 19:1 gear and an impulse generator with 16 ticks per revolution.
They drive special wheels which allow for omnidirectional movement [4,5].
Further, the robots use a rotating kicking device.
We also used specialized robots as defenders or for offense when appropriate.
They are also shown in the figure.
Figure 1:
Different robots designs. From left to right: classical two wheeled design, two wheeled defender, and robot with omnidirectional drive.
 |
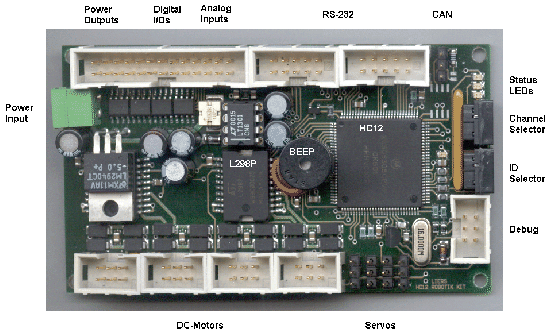
For local control we developed a new microcontroller board that is based on the Motorola HC12, as shown in Figure 2.
This controller features 8KB RAM, 2KB EEPROM, 128KB flash, several timers, four PWM-units, digital I/Os, eight analog inputs, two RS-232 serial lines, and a CAN interface.
The board can drive with pulse-width modulation four DC-motors and captures the impulses generated by them.
Further, four servos can be steered and eight on/off switches can be used.
A mezzanine board contains a radio transceiver SE200 working in the 433MHz band that can be tuned to 15 channels in 100kHz steps.
The robots receive commands via a wireless serial link with a speed of 19,200 baud.
The host sends
10-byte packets that include address, control bits, motor speeds, and checksum.
The microcontroller decodes the packets, checks their integrity, and sets the target values for the
control of the motor speeds.
Our robots are powered by 8 Ni-MH rechargeable mignon batteries.
We implemented locally a PID-control of the motor speeds.
Figure 2:
HC12 microcontroller board.
 |
Next: Computer Vision and Prediction
Up: FU-Fighters 2001 (Global Vision)
Previous: Team Development
Sven Behnke
2001-11-01