
Introduction
What is RoboCup?
RoboCup, the soccer world championship for autonomous robots (divided in three leagues) and software agents, is held once a year. This international meeting encourages researchers to compare and explore new ideas in the field of robotics. RoboCup is hosted by the RoboCup Organisation and the respective national committees.
What is it good for?
The competition is held to foster public awareness of the current level of development of intelligent machines. Robotic soccer has become a new benchmark problem in the area of artificial intelligence. In contrast to computer chess, we have to analyse fuzzy and fast changing sensor data in real time, predict game situations and produce control commands, in order to make decisions which couses sensefull actions of every single robotic. The robots must also communicate in order to be able to cooperate during the game. Our research is one step further towards the personal robots of the future, which could be so widespread as personal computers today. There are many possible technical applications, which will profit from research in autonomous robots: Industrial automation, mobility systems for handicapped people, exploration in hazardous environments, and last but not least, intelligent toys.
Who are the FU - Fighters?
The FU-Fighters are the soccer playing robots at the Free University of Berlin. Our project team is composed of students and researchers from the Artificial Intelligence Group at the Institute of Computer Science. We build robots for the Small Size and the Mid Size League.
FU-Fighters vs. BigRed RoboCup99, Stockholm

FU-Fighters vs. Philips, German Open 2002 Paderborn
Our team emerged from a Seminar on Control of Autonomous Agents in the winter term 1998/99. In august 1999 we went in for the RoboCup in Stockholm and became Vice World Champion.
How do the FU Fighters work?
The general scheme for both robot legues is the following control loop: A video camera captures an image of the current situation. This image is then processed by the vision system to extract information about the position and velocities of all objects on the field. The behavior program is then able to calculate the next step and send the appropriate commands to the robots.
Mechanics, electronics, and communication
* Self-made aluminium frame
* Three DC motors with transmission for the drive
* Control system HC12
* Transceiver working at 868 and 914 MHz, WLAN or bluetooth
Hierarchical Behavior Control
Behaviour control
* Reactive, layered system of sensors, behaviors, actuators
* Higher levels sensors aggregate information
* Higher level behaviors modulate lower level behaviors
* There is no explicit world model. Fast reactions are possible
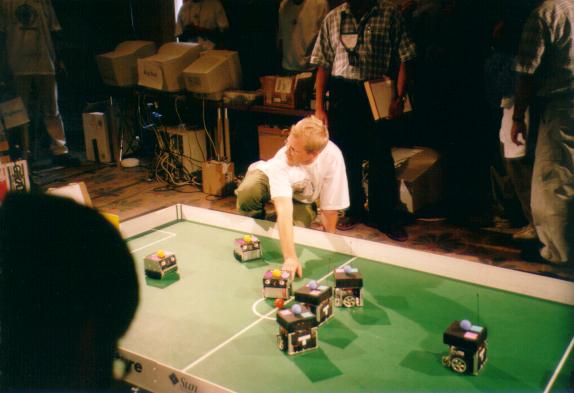
The Small Size Robots
A video camera above the field captures an image with a rate of 30 frames per second. Those pictures are then processed by an extern computer to calculate the positions of the robots and the ball. In a complex and hierarchical decision process the next actions to be taken are determined and finally send to the robots by radio or bluetooth to be executed.

Small-Size Robot Model 2002
Properties of the Small Size Robots
* Image capturing with a video camera above the field
* Tracking the ball and the robots using color markers
* Hierarchical behavior control with ball prediction
* Linear electromagnetic shooting mechanism and dribbling mechanism
The Mid Size Robots
Unlike the Small Size robots, the Mid Size robots have their own camera. The FU-Fighters use a small camera pointing upwards which captures an allround overview of the field through a special convex mirror. The vision system and hierarchical behavior program run on a laptop on each robot locally. The communication between the robots is realized over WLAN.

Mid-Size Robot Model 2002 with Ball
Properties of the Mid Size robots
* Image capturing with small omnidirectional camera
* Line tracking for fast moving images
* Calculating mirror distortion and determining positions of the ball and obstacles
* Dribbling mechanism


A view (left image) from the omnidirectional mirror (right image)
Future Work
Currently we are transfering the successful Small Size software to the Mid-Size robots. In addition, the behavior software will "learn to learn" how to react best in specific situations. In the Small-Size-League at German Open 2003 we will apply a double camera system for the first time. In the Mid-Size-League the vision system should adapt on the environment on its own and more sensors will be integrated.
Sponsors
We thank the colleagues at the Fritz-Haber-Institut (plate, frame, loading device) the Physics garage (mechanic components) and the Physics electronic laboratory at the FU Berlin (DC/DC-changer) and the companies: Microsoft Germany GmbH (finance),TYP AG/SA/Ltd (cylinders in rubber), Dr. Fritz Faulhaber GmbH & Co KG (engines, gears), Sony Germany GmbH (digital-cameras, camera interface card and notebooks), Conrad Elekronik GmbH (microcontrollers) und Siemens AG (radio moduls) for their support, patience and preferential treatment.
Persons
The leader of the FU-Fighters is Prof. Raúl Rojas. The team in 2004 consist of Ketill Gunnarsson, Bastian Hecht, Achim Liers, Fabian Ruff, David Schneider, Mark Simon, Oliver Tenchio, Fabian Wiesel.